
誰でも作れる小さなヒューマノイドPLEN2(プレンツー)で、ロボットと暮らす未来をみんなに届けたい!
歩いています
みなさんこんにちは!
PLEN2は今、ようやく全身の試作ができて、歩行実験やその他の動作検証を行っています。
何だか初期のASIMOの歩行実験のようですが。。
なぜこんなテストが必要かと言いますと、、 PLENに限らず多くの小型のロボットにはサーボという特別なモーターが使われています。

サーボモーターは普通のただぐるぐる回るモーターと違って、細かい角度制御ができるモーターで、例えばラジコンカーのステアリングとかラジコンヘリや飛行機なんかに使われている特殊なモーターです。
特殊ということは、、
やっぱり高いんです。。
初期のPLENは1体25万円で売っていましたが、極端な話これはほぼサーボモーターの価格と言い換えても良いかと思います。
なぜなら、ラジコンカーは1個、ラジコンヘリでも2個ぐらいしか使いませんが、ヒト型ロボットはその関節ひとつひとつがサーボモーターなので関節の数だけ必要になるんですね。
PLENの場合は18個!必要なんです。
もうちょっと減らして、例えば14個ぐらいじゃダメなの??
ダメなんです。。
14個じゃスケボーとかローラースケートができないし、その他のPLENらしいかわいい動きもできなくなってしまうんです。。

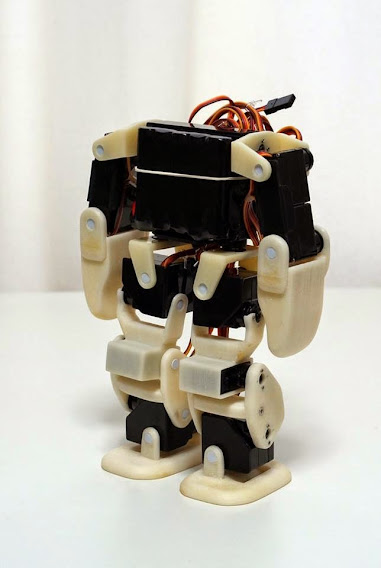
ということで、この実験用PLEN2も同じく18個のサーボモーターを使ってるんですが、初期のPLENと大きく違うところは、
①技術革新でサーボのコストが大幅ダウン!
②前回より小さなサーボを使っているのでPLEN2はさらに小型化!
というところです。
①②のおかげで、PLEN2はPLENより低価格でより小さなロボットになる予定です。
が、いくら安くて、小さくなったとしても、運動性能が下がってしまっては意味がありません。 そのための動作テストなんですね〜
今後も進捗情報アップします!
お楽しみに!